New Twitter feed for FIRST FRC 2009 Field Management System
I have blogged several times before about my involvement in building the Field Management System that runs the FIRST FRC events. Each year I have worked very hard with 2 other engineers on trying to build the best possible experience for the volunteers that run the event, teams that participate in the event, and the audience that attends the event. This year we wanted to extend the experience to beyond those that actually attend the event. We wanted to have a way to announce the results of the matches as they are happening on the field. This has been done in the past by updating an HTML web page that gets posted on the FIRST web site. But we wanted something more that could be used by the teams in their quest for knowledge on what is happening during each event on their device of choice.
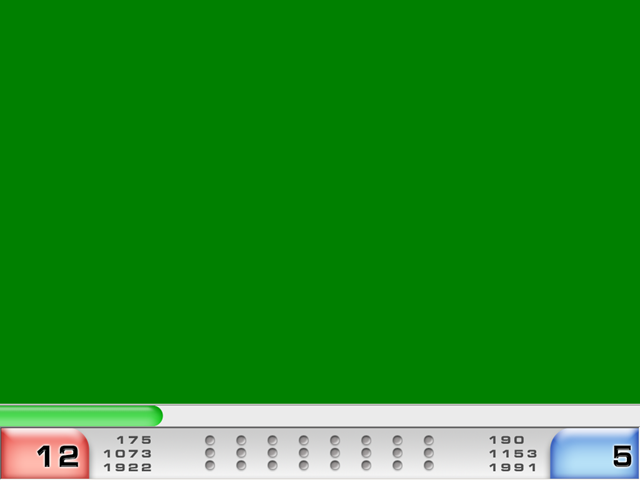
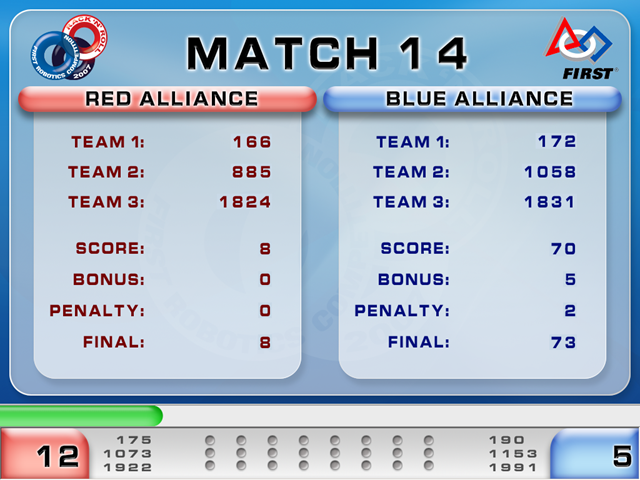
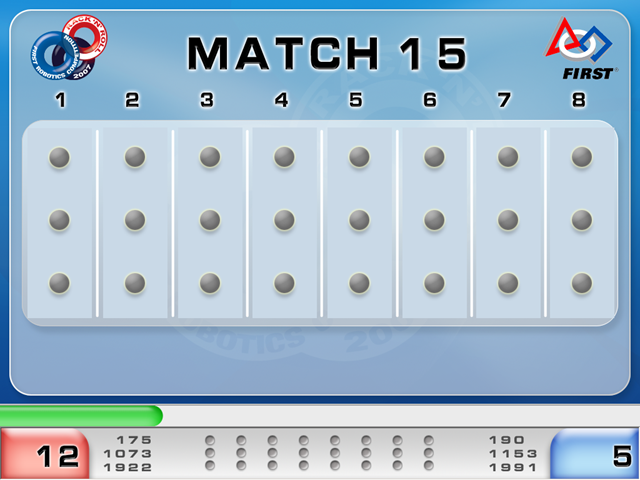
So I am very pleased to say that this years event will have twitter updates for each match as they are completed on the field. All you have to do is follow the FRCFMS twitter account in order to get match updates from all events. The tweets that are posted follow a specific format that should allow the teams to build really cool applications on top of the twitter data. Here is an example tweet of our test event:

As you can see in the tweet it is a little hard to read as we are jamming a bunch of information into the 140 character limitation but this should be vary easy to parse the information with a bot of some sort.
The format is defined as follows:
#FRCABC - where ABC is the Event Code. Each event has a unique code.
TYP X - where x is P for Practice Q for qualification E for Elimination
MCH X - where X is the match number
ST X - where X is A for Autonomous T for Teloperated C for complete
TIM XXX - where XXX is the time left
RFIN XXX - where XXX is the Red Final Score
BFIN XXX - where XXX is the Blue Final Score
RED XXX YYY ZZZ - where XXX is red team 1 number, YYY is red team 2 number, ZZZ is red team 3 number
BLUE XXX YYY ZZZ - where XXX is blue team 1 number, YYY is blue team 2 number, ZZZ is blue team 3 number
RCEL X - where X is the red Super cell count
BCEL X - where X is the blue Super cell count
RROC X - where X is the red rock and red Empty Cell count
BROC X - where X is the blue rock and blue Empty Cell count
There are some cool ways you can use twitter to get the information you want for a specific event. Hop on over to search.twitter.com and enter in the following #FRCTEST TYP Q and you will get a list of all qualifying matches for the TEST event. When the events start this weekend you can substitute the TEST code with the event code of your choice. The FIRST FRC Team update has a list of all the valid event codes.
You can also use the search.twitter.com with your favorite RSS reader to get updates in RSS format.
If other tweeple are tweeting about the event and using the same hashcode that the Field Management System uses then you can hop on over to #hashtags and enter in the hash code for the event and see all tweets for that event. For example try navigating to http://www.hashtags.org/tag/frctest and you will see all the tweets for the #frctest event that we have been running to test the Field Management System.
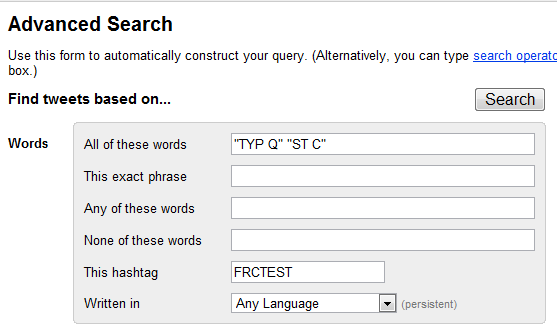
Although for week one the match tweets will only be at the end of each match, week 2 we are thinking about upping the frequency of these tweets so that you get more of them while the match is in play. This will make it very difficult for a human to read the tweets on a small device because they will be too many of them coming. I would like to hear any ones thought on what the frequency of tweets should be and if they expect to be reading the tweets rather than parsing them with another tool. Of course if you intend to read the tweets and you are only interested in the final match result you could use the search.twitter.com advanced search capabilities to only view tweets that have the status of complete. That search would look something like this:
It will be really cool to see how the information we are posting is going to be used!